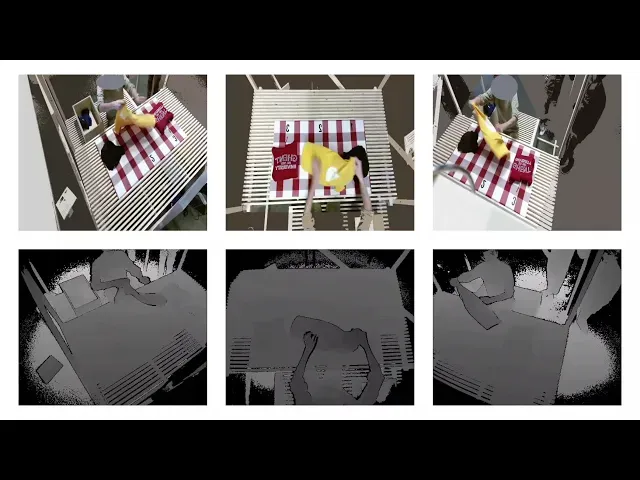
General-purpose cloth folding robots do not yet exist due to the deformable nature of textile, making it hard to engineer manipulation pipelines or learn this task. In order to accelerate research for the learning of the robotic folding task, we introduce a video dataset of human folding demonstrations. In total, we provide 8.5 hours of demonstrations from multiple perspectives leading to 1.000 folding samples of different types of textiles. The demonstrations are recorded on multiple public places, in different conditions with random people. Our dataset consists of anonymized RGB images, depth frames, skeleton keypoint trajectories, and object labels.
The full dataset can be found on GitHub and was published in the International Journal of Robotics Research: Verleysen, A., Biondina, M., & wyffels, F. (2020). Video dataset of human demonstrations of folding clothing for robotic folding. INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH, 39(9). https://doi.org/10.1177/0278364920940408